







Тема №4: Установившиеся режимы полёта. Планирование. Анализ поляры скоростей крыла дельтаплана.
Установившееся планирование. Силы, действующие на СЛА в установившемся планировании.
В прошлой теме мы уже разбирали установившееся планирование дельтаплана и силы, действующие в этот момент на крыло. Итак, на дельтаплан в общем случае действует две силы - сила тяжести G и полная аэродинамическая сила R. При планировании сила R направлена вертикально вверх и равна полётному весу дельтаплана R = G. Разложим эти силы по оси Х, направленной вдоль вектора скорости дельтаплана, и по оси Y, направленной перпендикулярно к вектору скорости из центра тяжести системы (рис. 1).
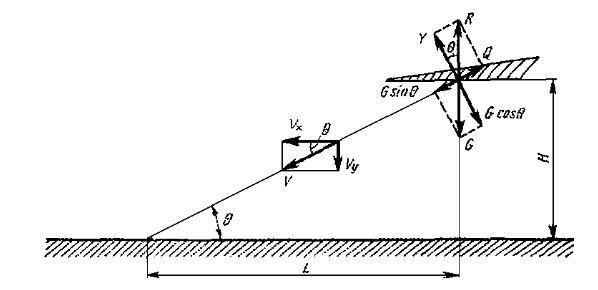
Рис. 1. Схема сил, действующих на дельтаплан при планировании, где θ - угол планирования, Н - высота планирования, L - дальность планирования.
Силу тяжести G разложим на две составляющие: в направлении, перпендикулярном траектории движения G*cosθ, и в направлении вдоль движения дельтаплана G*sinθ.
Полную аэродинамическую силу R разложим на подъемную силу Y, уравновешивающую силу G*cosθ (это обеспечивает прямолинейность движения), и силу лобового сопротивления Q, уравновешивающую силу G*sinθ (это обеспечивает постоянство скорости по траектории).
Исходя из вышесказанного, получаем, что планирование дельтаплана – это прямолинейное и равномерное движение дельтаплана, при котором его масса полностью уравновешена полной аэродинамической силой.
Угол, образованный траекторией планирования и линией горизонта, называется углом планирования.
При данном угле планирования θ и с данной высоты H дельтаплан улетит на определенное расстояние. Это расстояние, проходимое дельтапланом относительно земли с заданной высоты, называется дальностью планирования.
Понятие качества крыла.
Аэродинамическим качеством дельтаплана называют отношение подъемной силы к силе лобового сопротивления или отношение коэффициента подъемной силы к коэффициенту лобового сопротивления.
На одной из первых лекций по аэродинамике мы разбирали зависимость подъемной силы и силы лобового сопротивления от угла атаки. И находили на поляре Лилиенталя 1-го рода точки, соответствующие определенным углам атаки. Одним из этих углов был наивыгоднейший угол атаки - угол, при котором отношение коэффициентов подъемной силы и сопротивления Cy/Cx максимально. Это соотношение и назвали максимальным аэродинамическим качеством крыла дельтаплана.
И мы также говорили, что при установке крыла на наивыгоднейший угол атаки оно полетит дальше всего. Соответственно, дальность планирования дельтаплана тесно связана с понятием аэродинамического качества крыла.
Рассмотрим это утверждение подробнее. Угол, между подъемной силой Y и полной аэродинамической силой R, равен углу планирования θ (рис. 1). Отсюда следует, что ctgθ = Y/Q. Но Y/Q = К, таким образом

Отсюда следует, что угол планирования θ зависит только от аэродинамического качества дельтаплана и совершенно не зависит от его массы.
Из теоремы Пифагора (рис. 1) очевидно, что
Но, как мы уже выяснили, ctgθ = К, соответственно
Следовательно, дальность планирования дельтаплана увеличивается с увеличением аэродинамического качества и высоты полёта. Наибольшая дальность планирования при заданной высоте может быть достигнута при полёте на наивыгоднейшем угле атаки, так как при этом соотношение Cу и Cх, а соответственно и качество, максимально.
Стоит заметить, что опять же масса дельтаплана не имеет никакого влияние на аэродинамическое качество крыла.
Аэродинамическое качество крыла дельтаплана зависит от параметров, влияющих на коэффициент подъемной силы Cу и коэффициент лобового сопротивления Cх, а именно:
- форма профиля;
- шероховатость поверхности крыла;
- наличие неудобообтекаемых элементов на крыле, создающих дополнительное индуктивное сопротивление (троса, фал подцепа, мачта);
- положение пилота;
- удлинение крыла;
- распределение нагрузки по размаху крыла.
Влияние удельной нагрузки, силы и направление ветра на характеристики планирования.
Всё вышесказанное справедливо при полёте в штиль. При наличии ветра дальность полёта изменяется в зависимости от того, встречный или попутный ветер сопровождает наш полёт.
Движение дельтаплана при наличии ветра состоит из его собственного движения относительно воздуха H*K и перемещение его воздухом относительно земли за определенное время W*t, где W – скорость ветра.
Дальность планирования в этом случае определяется по формулам:
где Н – заданная высота планирования (м), К – аэродинамическое качество дельтаплана, W – скорость ветра (м/с), t – время планирования с данной высоты (с).
При наличии ветра масса пилота оказывает некоторое влияние на дальность планирования дельтаплана. При попутном ветре дальность планирования дельтаплана с увеличением полётного веса дельтаплана уменьшается, т.к. вследствие увеличения скорости планирования уменьшается время планирования и, соответственно, воздействия попутного ветра на крыло.
При встречном ветре, наоборот, с увеличением полётного веса дальность планирования дальность планирования будет увеличиваться, т.к. с увеличением скорости планирования и уменьшением время планирования уменьшается время воздействия на крыло встречного ветра.
Поляра скоростей. Анализ поляры скоростей для крыла дельтаплана.
Высота, которую дельтаплан теряет при планировании за единицу времени, называется вертикальной скоростью планирования или скоростью снижения Vy.
Расстояние, которое дельтаплан проходит параллельно земле за единицу времени, называется горизонтальной скоростью планирования или поступательной скоростью Vx.
График, показывающий зависимость вертикальной скорости снижения Vy от поступательной скорости Vx на различных углах атаки, называется полярой скоростей планирования (или полярой скоростей).
Поляра скоростей строится следующим образом: из начала координат проводится прямая, соответствующая траектории движения дельтаплана при данном режиме планирования, составляющая с горизонтальной осью угол θ (угол планирования).
По каждой траектории движения откладывается величина скорости планирования V, соответствующая данному режиму планирования. Получается, каждой скорости планирования (V1, V2, V3 и т.д.) соответствует свой угол планирования (θ1, θ2, θ3 и т.д.). Соединив концы векторов скоростей планирования плавной кривой, получим поляру скоростей планирования (рис. 2).

Рис. 2. Поляра скоростей.
Перпендикуляр, опущенный из конца вектора скорости планирования на горизонтальную ось, укажет значение поступательной скорости Vx, а перпендикуляр на вертикальную ось – значение скорости снижения Vу. Горизонтальная и вертикальная скорости будут также характеризовать данный режим планирования.
Рассмотрим характерные точки поляры скоростей, соответствующие определенным режимам планирования (рис. 3).
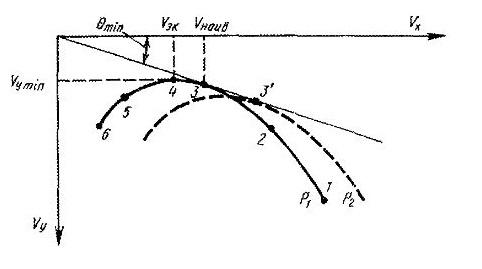
Рис. 3. Режимы планирования по точкам поляры скоростей.
- Область 1-2 соответствует режиму крутого пикирования: полёт на больших скоростях со значительным углом планирования.
-
Область 2-3-4-5 соответствует эксплуатационным режимам полёта: средние скорости, средние углы планирования.
- Точка 3, образованная касательной к поляре, проведенной из начала координат, соответствует скорости, при которой угол планирования наименьший и качество наибольшее – наивыгоднейшей скорости Vнаив.
- Точка 4, образованная касательной к поляре, проведенной параллельно горизонтальной оси, соответствует той скорости планирования, при которой скорость снижения Vy минимальна – экономической скорости планирования Vэк. Экономическую скорость выбирают при обработке восходящих потоков или при полёте с максимальной продолжительностью.
- Область вблизи точки 5 соответствует режиму парашютирования, используемому при посадке.
- Область 5-6 соответствует режиму, при котором дельтаплан начинает «сыпаться» (скорость снижения быстро увеличивается), что в дальнейшем может привести к сваливанию на крыло.
Изменение нагрузки на крыло p=G/S приводит к тому, что поляра скоростей смещается относительно исходной кривой в сторону больших или меньших скоростей в зависимости от того, увеличивается или уменьшается нагрузка (рис. 3, пунктирная линия).
Стоит отметить, что значение максимального качества при этом практически не меняется (точки 3 и 3’, рис. 3).